
Het is dus een meetinstrument wat gevoelig is voor hoekverdraaiing.
In dit geval bezit de gyro een in en uitgang waardoor het mogelijk wordt hem automatische aansturingen te laten verrichten.
De richting waarin hij gevoelig is wordt bepaald door in welke richting hij op de heli gemonteerd wordt.
Hij wordt gekoppeld tussen de staartbesturings-servo en de ontvanger.
De functie van de gyro is het opvangen van een plotselinge ongewilde staartverdraaiing door b.v. wind vlagen.
Door de gyroscopische werking wordt de staart automatisch terug gestuurd in tegengestelde richting van de plotselinge verdraaiing.
De maten van gevoeligheid van de gyro is instelbaar.
In hoofdlijnen zijn er twee soorten wat de werking betreft:
Een die wel de plotselinge bewegingen van de staart door b.v. windvlagen opvangt maar niet de richting waarin de staart oorspronkelijk naar toe stond corrigeerd (normale funtie) en een die ook deze functie kent en zelf in staat is om bij behoorlijke zijwind toch de staart in de oorspronkelijke richting te houden de z.g. heading-hold of heading-lock.
Als bij deze laatste de richting veranderd wordt door een stuursignaal van de zender wordt dit dan als nieuw uitgangspunt gekozen.
Voor het leren vliegen (hoveren) is zeker deze laatste methode aan te bevelen.
Ook is in sommige gevallen de gevoeligheid vanaf de zender in te stellen
Normal of Heading Hold
De gyro kan dus Normal en Heading Hold
(HH).
Normal mode houdt in dat de gyro een "onbedoelde" verdraaiing van de
staart zal tegenwerken.
Stel je hebt een rukwind die je staart
verdraait. De gyro zal dan tegensturen totdat de staart weer stil
staat.
Dit heeft dus tot gevolg dat je staart wel verdraait, maar niet veel.
Geef je bijvoorbeeld hard gas omhoog vanuit een hoover dan zal de
staart wel bv 10 graden verdraaien, maar daar stoppen.
Heading Hold houdt in dat de heli zijn Heading (richting) houdt.
De Gyro "weet" hoe de heli staat. Komt
er een rukwind die de staart 30 graden verdraait dan zal de gyro net zo
lang tegensturen totdat hij weer op zijn 0-positie komt.
Je staart staat hierdoor dus altijd strak !!!
Gyro gevoeligheid:
De sensitivity van de Gyro stel je normaal in via de schuif of
schakelaar.
De meeste HH gyro's werken als volgt.
-100% (schuif naar onder) = 100% HH mode
-50% (schuif half naar onder) = 50% HH mode
0% (Midden) is NIETS, je Gyro doet dan NIETS en is totaal overgelaten
aan externe invloeden zoals torque en wind, NOOIT DOEN !!
+50% (schuif half naar onder) = 50% Normal mode
+100% (schuif naar onder) = 100% Normal mode
*** Afhankelijk of je het kanaal inverteert kan dit dus omgedraaid zijn
***
Instellingen testen:
Hoe weet je nu wat je ingesteld heb
- Zet alles aan zonder draaiende motor.
- Zet hem de schuif op -100% (we denken dat dit bv HH is)
- Draai de heli om zijn as (bv rechtsom)
- De gyro gaat corrigeren.
- Gaat de staart na correctie weer geheel naar zijn middelpunt terug?
Dan is dit NORMAL MODE.
- Blijft de staart in een "hoek" staan?
Dan is dit HH, als je de heli weer terug in de originele hoek zet
zal de staart ook pas weer naar zijn middelpunt gaan.
(LET OP !!, de 401 blijft bv niet helemaal in de hoek staan maar gaat weer een beetje terug.
Maar je blijft wel
zien dat hij niet in het midden staat)
Reverse functie van de Gyro:
Stel je hebt alles goed zover.
Verdraai de heli in HH mode, de staart corrigeert.
Maar doet hij dit goed?
Stel je voor hoe de luchtstroming gaat door de staart te draaien in de
juiste richting (dikke kant eerst).
Als je de staart naar rechts draait moet de staart corrigeren naar
links (tegensturen).
De dikke kant van het staartrotorblad moet dan ook naar links "wijzen".
Doet hij dat verkeerd om dan versterkt de gyro iedere ongewilde input.
Hij zal dan in een 100% spin terecht komen = heli dood.
Daarvoor is de reverse functie, deze inverteert de correctie.
Inverteer je iets? Controleer alle opnieuw.
De besturing, richting, correctie, alles.....
(lees dus je gyro en zender handleiding sowieso goed door).
HH en langzame servo's:
Waarom moet je zo'n snelle servo hebben?
Stel je hebt een trage servo en je gyro staat in HH mode.
- Je staart verdraait naar links door wind
- De gyro stuurt tegen, en de servo neemt de tijd om de gewenste verdraaiing te doen.
- De gyro wil graag terug naar zijn 0 positie en stuurt wat harder tegen
- De staart gaat terug en komt op zijn 0-punt
- De gyro zegt stop. en de servo gaat op zijn gemak naar 0
- Door de traagheid gaat de staart verder dan zijn 0-punt en schiet door
- De gyro gaat weer corrigeren, doorschieten, corrigeren
Voila, je hebt een Zwabberende staart
!!!
Is je servo WEL snel (9253/9254) dan is de servo sneller dan
de gyro en schiet de staart niet door. = STRAK !!
Normal mode en langzame servo’s:
In Normal mode wil de Gyro niet terug naar 0, alleen de verdraaiing stoppen.
Hierdoor zal hij nooit in de
“zwabberstand” terecht komen.
Dus een langzame servo schiet dan 20 graden door en een snelle maar 5
graden. Dus iets meer stuurwerk voor de piloot. Maar zeer doenlijk (heb
ik jaren gedaan).
Soepele aansturing:
Om de Gyro en servo optimaal te kunnen laten functioneren moet dus
ALLES zo soepel mogelijk lopen. Stroefheid kan er voor zorgen dat een
staart voorbij een 0-punt schiet en dus gaat zwabberen.
Instellen van de gevoeligheid:
Begin met ongeveer 40% of -40% te testen in Normal mode.
Werk met 5% omhoog totdat hij een beetje gaat hunten (snel zwiepen)
Dan weer 5% omlaag, DAT is JOUW Gyro setting.
Stel je komt neer op een optimale setting van je Gyro op 55%.
Wil je het jezelf makkelijk maken dan zet je de ATV van de schuif op
een max van 55% dan kun je de schuif ook nooit meer TE hoog zetten.
Je kunt ook een 2 standen schakelaar gebruiken en dan de Gyro
sensitivity daarmee aansturen.
De ene kant op -55% de andere +55% met de ATV.
Maar eerst via de schuif maar alles goed zetten
bron: http://www.jupiter-venlo.nl/Algemeen/Tips/Gyro.htm
SET-UP SMM GYRO GY-401 & S9253/S9254
|
De SMM_Gyro GY-401 dient uitsluitend te worden gecombineerd met een digitaal servo, de S9254. De gyro biedt wel is waar de mogelijkheid voor het aansluiten van een analoog servo, maar wij vinden dan dat de geleverde prestatie dan ver beneden het verwachtingspatroon blijven.
We zijn van mening dat het dan weggegooid geld is om zo'n technisch hoogstaande gyro te combineren met een ongeschikt servo.
De gyro biedt de mogelijkheid om tijdens het vliegen probleemloos te kunnen schakelen tussen de Heading Lock Modus HLM of AVCS-Modus en de Normaal Modus NM maar dan moet de set-up wel conform de handleiding worden uitgevoerd.
Dat omschakelen kan met een schuif, een draaitrimmer of met een toegewezen schakelaar, die bv gekoppeld is aan een bepaalde flight.
ATTENTIE: Het toerental van de heckrotor speelt ook een belangrijke rol in de effectiviteit van de gyro-werking zowel in de Normal-Modus als ook in de Heading-Lock-Modus. Bij een laag hoofdtoerental van 1050 rpm heeft de heckrotor ook een laag toerental. Dan is de werking van de heading lock modus minder snel. Dat wil zeggen dat na een snelle(re) pirouet de heck niet in 1x stilstaat als de knuppel in de middenstand staat. De heck "zwiept door". Meer info leest u onder punt 30 hierna. |
|
||
|
|
Zonder een goede set-up en dan toch overschakelen tussen HLM en NM en vica versa kan er een gevaarlijke situatie ontstaan !! |
|
|
|
|
|||
|
1. |
De gyro met het bijgeleverde dubbelzijdig klevende foam bij voorkeur bevestigen op de staartbuis of in het verlengde daarvan. Mikado heeft een prachtige carbon
tail-gyromount onder bestel-nummer 828 geschikt voor heckbuizen met een
diameter van 20 mm.
|
||
|
|
|||
|
2. |
Voor dat doel zijn er verschillende merken heckservohouders te koop (Robbe, Quick UK, Vario, Mikado, Ikarus etc.)
De foto rechts toont de carbon-houder van Mikado. Let er ook op dat de carbon aanstuurstang een hoek van 900 maakt ten opzicht van het servoheveltje !! |
||
|
|
|||
|
3. |
De aansturing van het heckservo <> hevel van de heckpitschslider bij voorkeur maken van carbon. Een stalen draad (vaak meegeleverd in de bouwdoos is voor de smm-gyro minder geschikt).
|
||
|
|
|||
|
4. |
De carbonaansturing dient zo veel
mogelijk een hoek van 900
te vormen ten opzichte van het
servohevel en het heveltje naar de heckpitchslider. |
||
|
|
|||
|
5.
|
a. het rode stekkertje daarvan = kanaal 5 ontvanger = gevoeligheid vanaf de zender te regelen + keuze mogelijk vanaf de zender tussen Normaal Modus en Heading Lock Modus.
b. Het zwarte stekkertje daarvan = kanaal 4 van de ontvanger = heckrotoruitgang.
c. Het 3-aderig kabeltje van de gyro met het blauwe kabeltje en zwarte stekkertje wordt verbonden met het kabeltje van het servo S9253 of S9254.
NB: wanneer de zender gebruikt maakt van een ander heckrotor- en/of gevoeligheidskanaal dan worden de stekkers natuurlijk aangesloten op die kanalen.
|
||
|
|
|||
|
6. |
De te lange bedrading NIET oprollen, maar lusvormig bijeen binden met een tyrap of krimpkous. Let er op dat de bekabeling niet wordt afgeknepen/stuk gaat.
Het beste is om ter plaatse van de tyrap een stukje siliconenslang, krimpkous of textielplakband aan te brengen waarover dan de tyrap komt. |
||
|
|
|||
|
7. |
De trim van de heckknuppel MOET in de zender op 0% staan en de trimhevel in de middenstand.
|
||
|
|
|||
|
8. |
Controleer of de gyro is afgestemd op het digitale servo = kleine switch op DS=ON (DS=digitaal servo).
|
Draai het potmetertje van de DELAY LINKS OM naar 0. Deze instelling moet bij digitale servo's primair op 0 blijven staan.
Bij andere typen servo's kunt u met delay de draaiende beweging van een pirouette naar een plotseling stilstand van de heck bijstellen.
|
Draai het potmetertje van LIMIT RECHTS OM naar 140 Het kan zijn dat de heckpitchslider nu bij volle knuppeluitslag aanloopt, doch dit wordt later weer bijgesteld. Even niet aan de heckknuppel komen lost dit probleem tijdelijk op :-)) |
|
|
|||
|
9. |
Zet nu de zender aan en daarna de ontvanger: kijk daarbij naar het ledje op de gyro. Brandt deze constant, dan staat de gyro in de Heading Lock Modus (= HLM).
Brandt die niet of knippert die dan staat de gyro in de Normaal Modus (= NM). Dit is ook te controleren door de heckknuppel naar links of naar rechts te bewegen en dan terug te zetten naar het midden. Blijft de heckpitchslider nagenoeg op dezelfde plaats staan = HLM. Loopt de heckpitchslider echter mee met de stick = NM.
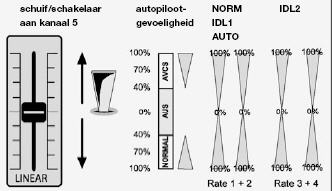
Als kanaal 5 wordt bediend met een schuif en de Heading Lock Modus ligt aan de "verkeerde kant", dan in de zender in het menupunt REVERSE de werkingsrichting van de schuif omkeren. Bij gebruik van een schuif is de centerclick (middenstand) het punt waarop er geen enkele gyrowerking is. Vanaf dit punt loopt de gyrowerking naar beide richtingen van de schuif op van 0% naar 100%. De schets geeft dit ook schematisch weer.
|
||
|
|
|||
|
10. |
Zet de ontvanger uit en daarna weer aan en controleer of het ompolen het door u gewenste effect heeft gehad en controleer of de gyro om te schakelen is van Heading Lock (led brandt constant) naar Normaal Modus (controle hiervan dmv heckknuppel naar rechts of links en dan weer naar het midden waarbij de heckpitchlider niet blijft staan maar met de beweging van de stick "meeloopt") en terug naar Heading Lock (led brandt weer constant). |
||
|
|
|||
|
11. |
LET OP: de SMM-GYRO MOET VANAF NÙ ALTIJD IN DE HEADING LOCK MODUS WORDEN AANGEZET/GECALIBREERD !!
Daarbij mag de heli niet worden bewogen.
Net zo lang wachten tot het ledje constant brandt.
|
||
|
|
|||
|
12. |
Heckknuppel naar links = neus van de heli naar links.
Als de draairichting verkeerd is, de ontvanger uitzetten. De draairichting van het servo omkeren in de ZENDER !!
Daarna de ontvanger opnieuw inschakelen in HLM = de LED MOET CONSTANT BRANDEN.
Daarna weer controleren of de knuppelrichting overeenkomt met de neusrichting van de heli.
DUS: NIET NAAR DE BEWEGING VAN DE HECK KIJKEN MAAR NAAR DE NEUS VAN DE HELI.
DE WERKINGSRICHTING VAN HET GYRO CONTROLEREN/VASTSTELLEN:
|
||
|
|
|||
|
13. |
Controleer of de werking van de gyro goed is.
Als de werking verkeerd is, de ontvanger uitzetten en daarna de draairichting van de gyro omkeren OP DE GYRO met het kleine switchje DIR (= direction = richting)
Daarna de ontvanger opnieuw inschakelen in HLM !! |
||
|
|
|||
|
14. |
Geef volle uitslag met de heckknuppel naar links en controleer of het servo/de heckpitchslider mechanisch aanloopt.
Dit zonodig afstellen door het potmetertje van LIMIT nu LINKS OM te draaien net zo ver tot de heckpitchlider vrij komt.
|
||
|
|
|||
|
15. |
Controleer de maximale heckuitslag naar rechts. Zonodig bijstellen als onder 14 is aangegeven. |
||
|
|
|||
|
16. |
Zet de gevoeligheid van de gyro IN DE ZENDER op 70% (ATV/Servo Eindpunt Menu kanaal 5) zowel voor de NM als voor HLM. |
||
|
|
|||
|
17. |
Nu wordt de afstelling op het vliegveld voortgezet.............
|
||
|
|
|||
|
18. |
Zet de zender aan en daarna de ontvanger. De gyro moet opstarten in HLM = ledje brandt constant (zie punt 12). |
||
|
|
|||
|
19. |
Zet daarna de gyro in NM en de heli met de neus in de wind. |
||
|
|
|||
|
20. |
Begin rustig de heli "op te pakken".......... Let erop dat de heck (nog) kan wegdraaien !!! |
||
|
|
|||
|
21. |
Indien de heck wegdraait, dan met de knuppeltrim VAN DE HECKKNUPPEL op de zender net zolang bij-trimmen totdat het heck keurig achter de neus blijft staan.
LET OP: Bij digitale knuppeltrim wordt de trimwaarde direct opgeslagen (FX18, FF9, PCM 1024 Z WXII). Bij een analoge knuppeltrim (FC28) zien we de knuppeltrim ook op een bepaalde plaats staan. |
||
|
|
|||
|
22. |
Daarna de heli landen en de motor uitzetten, maar nog NIETde spanning van de ontvanger halen !! |
||
|
|
|||
|
23. |
De zender en de ontvanger moeten hierbij nog steeds aanstaan omdat anders niet de juiste afstand kan worden gemeten.
Let bij het meten met ingeschakelde zender en ontvanger op de mogelijkheid cq. het gevaar van knackpulsen door metaal op metaal aanraking. De rotorkop bij de meting goed vasthouden door een collega-piloot. |
||
|
|
|||
|
24. |
Zet daarna de knuppeltrim weer op 0 %
. |
||
|
|
|||
|
25. |
Verschuif het servo naar voren of naar achteren over de heckbuis totdat de afstand tussen de heckpitchslider en het heckrotorhuis dezelfde is die u hebt opgemeten bij punt 23. |
||
|
|
|||
|
26. |
Maak daarna weer een proefvlucht: draait de neus nog een heel klein beetje weg, dan de laatste kleine fijnafstelling doen door een ball-link op de aanstuurstand in- of uit te draaien totdat de heck in NM keurig achter de neus blijft en niet meer wegdraait.
DUS NIET DE ZENDER- of KNUPPELTRIM GEBRUIKEN!!
DIE MOET IN DE ZENDER ALTIJD OP 0% BLIJVEN STAAN OM HET PROBLEEMLOOS SCHAKELEN TUSSEN HLM EN NM MOGELIJK TE KUNNEN MAKEN !!!! |
||
|
|
|||
|
27. |
Let er op dat de uiteindelijke gevoeligheid moet worden afgesteld voor de HLM en NM en wel zodanig dat in beide gevallen de heck keurig achter de heli blijft.
Ook dient u er rekening mee te houden dat de voorwaartse snelheid van de heli van invloed kan zijn op het pendelen van de heck. Dat houdt in dat voor het snelle vliegen, de gevoeligheid lager is.
Het beste is dan om een flight te maken en deze te bewaren onder een schakelaar. Dat kan alleen als de software van de zender de mogelijkheid biedt om verschillende gevoeligheidsinstellingen van de gyro per flight (idle up) op te slaan. Is dat niet het geval (b.v. FX-18 en FF-9) dan dient u genoegen te nemen met een gevoeligheids-instelling die op alle niveaus dezelfde is.
Dat houdt in feite in dat er voor alle niveaus een lagere gevoeligheid wordt ingesteld omdat immers de snelheid het referentiekader is geworden voor de gevoeligheidsinstelling van de gyro.
|
||
|
|
|||
|
28. |
Dan is de set-up gereed.
1. Nu kan met de schuif tijdens het vliegen tussen NM en HLM worden gewisseld zonder dat de heli de neus zal wegdraaien.
Daartoe eerst een proefvlucht maken op een voor u en het model comfortabele en veilige hoogte om dit omschakelen te testen op juiste werking. Het beste is als een collega vlieger de eerste keer omschakelt op uw commando zodat u uw aandacht bij het vliegen kunt houden. Spreek van te voren samen goed af hoe u dat gaat doen.
2. Een ander voordeel van deze set-up is dat de heli in de hoover kan worden gebracht zonder dat daarbij een correctie van de heck noodzakelijk is.
Dat gaat als volgt: De gyro aanzetten in de AVCS-modus. Voordat de heli in de hoover wordt gebracht, eerst de heckknuppel binnen 1 seconde 3x heen en weer van links naar rechts bewegen. De gyro stelt zich in op het neutraalpunt zonder trimwaarden.
Een andere methode daarvoor is om voor de start de schuif van de gyro even op Normal Modus te zetten. Dan ziet met de heckpitchlsider naar de neutraalstelling lopen en daarna de schuif weer op AVCS-modus zetten.
Met 1 van deze twee methodes kan de heli in de hoover kan worden gebracht zonder dat er een correctie hoeft plaats te vinden op de heck. Omdat de trim niet is gebruikt voor de nulpuntinstelling, werkt dit altijd en probleemloos bij elke start. |
||
|
|
|||
|
29.
|
Wanneer de heck blijft pendelen tijdens de hoover, dan kan het zijn dat de gevoeligheid te groot is. Deze dan terugzetten met de schuif totdat de heck rustig is. Dan de heli landen en in de zender het percentage handmatig terugzetten naar die waarde, waarna de schuif weer op volle uitslag komt te staan.
Wanneer het percentage lager is dan 50% dan is het beter om de ball-link een gaatje (of meer) verder naar binnen te zetten op het servo of op het aanstuurheveltje van de heckpitchslider. Daarna kan het percentage van de gevoeligheid weer omhoog. Wij geven er de voorkeur aan de gevoeligheid niet beneden de 70% te laten komen.
Tot nu toe is dat voor elke heli altijd gelukt zonder noemenswaardig problemen of moeilijkheden.
Heel sporadisch kost het iets meer moeite om de juiste set-up te vinden. Als blijkt dat het niet helpt het stuurstangetje op het servo een gaat of meer verder naar binnen te zetten en het heck blijft pendelen, dan kan de oorzaak daarvan ook liggen in de heckrotorbladen. Snij in dat geval 3 mm van de heckbladen af. De bladen dan wel weer balanceren en dan weer monteren. Dit alles bij een instelling van 70% in de zender. Blijkt dat het pendelen dan (iets) minder is, dan dient u dus heckbladen te monteren met een juiste lengte. Daarvoor zijn geen richtlijnen. Gewoon een paar setjes kopen of een langere set inkorten. Andere mogelijkheden zijn er niet.
Het is dus even wikken en wegen tussen de mechanische mogelijkheden in combinatie met de gevoeligheid om de goede set-up te krijgen. |
||
|
30. |
LET OP: De heckrotor moet een bepaald aantal toeren draaien om de werking van de gyro goed te kunnen doen plaats vinden. Als het rpm van de heckrotor relatief laag is, dan is dat te merken door een snelle stuurbeweging met de heckknuppel te maken en dan de stick direct weer stil in het midden zetten. De heck zal dan doorswingen en daarbij (al naar gelang de gestuurde richting) een apart "swappend" geluid produceren. Bij de Eco8 kunnen we dat oplossen door het tussentandwiel aan te passen. De Logo-familie kent daarvoor geen tandwielaanpassing. Soms helpt het om daarvoor andere rotorbladen te gaan gebruiken (iets breder of iets langer).
Het omgekeerde kan natuurlijk ook: de heck wil niet echt mooi strak staan omdat de toegepaste bladen te lang of te breed zijn. Onze ervaring is dat in de meeste gevallen de standaard heckrotorbladen kunnen worden gebruikt, die bij een bouwdoos worden geleverd. Die geven in de meeste gevallen het beste resultaat.
Ook hier geldt dan: Het is dus even wikken en wegen tussen de mechanische mogelijkheden in combinatie met de gevoeligheid om de goede set-up te krijgen. |
||
|
|
|||
|
Hoe beter deze afstelling hoe meer profijt en plezier u van uw GY401 zult hebben. Onthoud dat zelfs de beste gyro met een slechte set-up een matig werkend ding zal zijn. Neem dus daarom voldoende tijd om deze gyro set-up in alle rust goed en degelijk te kunnen uitvoeren.
O, ja........nog even het volgende: goed materiaal met een goede set-up is niets zonder een goede piloot ! ! !
|
|||
|
|
|||
 Het
digitale servo eveneens bij voorkeur bevestigen aan de
tailboom/heckbuis.
Het
digitale servo eveneens bij voorkeur bevestigen aan de
tailboom/heckbuis. 


 Het
kabeltje van de gyro waaraan twee stekkertjes zitten, wordt als volgt
aangesloten:
Het
kabeltje van de gyro waaraan twee stekkertjes zitten, wordt als volgt
aangesloten:


 Controleer
of het heckservo de heckbladen op de juiste manier aanstuurt: knuppel
rechts = neus van de heli naar rechts.
Controleer
of het heckservo de heckbladen op de juiste manier aanstuurt: knuppel
rechts = neus van de heli naar rechts. 
 Meet de afstand tussen de
heckpitchslider en het heckrotorhuis op met een schuifmaat.
Meet de afstand tussen de
heckpitchslider en het heckrotorhuis op met een schuifmaat.
|
BETEKENIS VAN DE MONITOR-LED |
|
|
|
|
|
snel achter elkaar knipperen |
gyro bevindt zich na het inschakelen in de initialisatiefase |
|
|
|
|
constant branden |
gyro in avcs-modus |
|
|
|
|
LED uit |
gyro in normaal modus |
|
|
|
|
langzaam voortdurend knipperen |
geen heckrotorsignaal |
|
|
|
|
knippersignaal met onderbreking |
gyro werd in normaal modus ingeschakeld |
|
|
|
|
2x ritmisch knipperen |
het ontvangersignaal in avcs-modus verschilt van de neutraalstelling. Dit knipperen gebeurt ook indien de heckknuppel wordt bewogen. |
|
|
|
|
1x ritmisch knipperen |
wanneer de schuif van de zender ten minste 3x snel heen en weer wordt bewogen tussen normal en avcs modus en waarbij de schuif dan in de avcs modus eindigt. |
Bron: http://www.helifun.info/Programmeringen/pr09.htm
Futaba GY611 Gyro w/ BLS251 Brushless Servo

| GY611 Ratings | |
| Display device | 8-character dot matrix liquid crystal display |
| Operating voltage range | DC 3.8V to 6.0V |
| Current drain | 70mA (@5.0V, including sensor) |
| Dimensions | 57 x 32 x 15 mm (amp), 30 x 30 x 18 mm (sensor) |
| Weight | 34 g (amp) + 30g (sensor) |
Voegt een nieuwe dimensie toe van controle voor grotere en middelgrote helikopters.
Een
super smalle puls (760μs) drive systeem verbetert sterk de servo
reactie; snelle verwerking verhoogt gyro reactie.
De hoge-resolutie 12-bit Analoog naar Digitaal converteert nauwkeurig
de sensor output naar een digitaal signaal.
Nieuwste generatie SMM (Silicon Micro Machine) technologie en een
lage-back aeroform geval verbeteren trillingen weerstand en neutraal
kenmerk.
De zeer nauwkeurige GY611's hoeksnelheid sensor stelt de AVCS nog beter
uit te voeren, het minimaliseren roer neutrale positie drift en het
opheffen van de noodzaak om het roer trimmen tijdens de vlucht.
Futaba heeft een nieuwe digitale servo met borstelloze motor op de
markt gebracht.
 We hebben het hier over de
Futaba BLS251 (0,06 sec/60° @
4.8V). Hij is speciaal gemaakt voor de
staartaansturing en is geschikt voor een gyro zoals de Futaba GY401 en
GY611. Het voordeel van de borstelloze motor is dat hij langer meegaat
en functioneert op een veel lagere temperatuur niet borstelloze
motoren. Het schijnt dan ook de snelste digitale servo (van Futaba) te
zijn die tot nu toe op de markt is. Naar verwachting is hij vanaf
september 2007 leverbaar in Nederland.
We hebben het hier over de
Futaba BLS251 (0,06 sec/60° @
4.8V). Hij is speciaal gemaakt voor de
staartaansturing en is geschikt voor een gyro zoals de Futaba GY401 en
GY611. Het voordeel van de borstelloze motor is dat hij langer meegaat
en functioneert op een veel lagere temperatuur niet borstelloze
motoren. Het schijnt dan ook de snelste digitale servo (van Futaba) te
zijn die tot nu toe op de markt is. Naar verwachting is hij vanaf
september 2007 leverbaar in Nederland.


| Manual | GY611 |
De Futaba GY611 Gyro is vrij eenvoudig te installeren, de handleiding die meegeleverd wordt is niet de gemakkelijkste om te begrijpen en geeft niet aan hoe hij voor de gemiddelde piloot ingesteld moet worden.
Als u al moeite heeft met de installatie
van uw GY611 of gewoon behoefte heeft aan een duwtje in de goede
richting, zijn hier wat aanbevelingen.
Opmerkingen:
Pirouette Snelheid: Om de pirouette snelheid van je heli in te stellen
, moet u het roer ATV aanpassen in uw zender. Als je begint met een
limiet van 70% (beide richtingen) geeft het je een goed voorspelbare
pirouette snelheid. Als je een snellere staart wilt, kunt u deze waarde
verhogen, of als u een lagere pirouette snelheid wilt, kunt u het
verlagen.
Revo / Program Mixing: Voordat je begint,
loop je eerst door je zender instellingen en zorg ervoor dat alle Revo
/ programma-instellingen ofwel het mengen zijn ingesteld op (INH) of 0%
zodat ze niet kunnen interfereren met de werking van de Gyro .
Rudder Trim: De GY611 is niet instelbaar door het roer trim in uw
zender en je wilt er zeker van zijn dat u de waarde op 0 (gecentreerd)
heeft. Als u een Futaba 9C, 9Z of 14MZ zender hebt, kunt u deze roer
trim volledig uitschakelen om eventuele ongelukken te voorkomen.
Part 1 – Gyro & Servo Installatie
Stap 1:
Monteer de gyro aan uw heli met behulp van de montage pads of met uw eigen montage hardware.
Stap 2:
Monteer de controle versterker op uw helikopter frame rekening houdend met de locatie voor de toegankelijkheid en de bescherming in geval van een crash. U kunt elke combinatie van sterke dubbelzijdige tape, montage pads, plastic zip-banden of klittenband. U zult er ook voor moeten zorgen dat de bedrading van uw controleversterker uw ontvanger kan bereiken, en je gyro en roer servo bedrading kan bereiken.
Stap 3:
Installeer het roer servo, maar sluit niet de servo horn of roer link aan.
Stap 4:
Steek de gyro en roer servo stekkers in de juist gelabelde plekken in de controleversterker.
Vervolgens steekt u de staartroer-uitgang van de controle versterker in het staartroer kanaal van uw ontvanger en steek de aux-uitgang in een reservekanaal op je ontvanger met een gemakkelijk toegankelijke schakelaar waarmee je de gyro versterking kan aanpassen. Als u geen extra kanaal beschikbaar heeft, geen probleem, kan de Gyro versterking handmatig worden aangepast in de controleversterker.
Part 2 – Gyro Setup & Programming

De "+" en "-" FUNC (functie) toetsen kunnen gebruikt worden om het menu van de controle-versterker en de "+" en "-" DATA knoppen kunnen worden gebruikt om de waarde in het menu te veranderen.
Stap 1:
Voordat we beginnen met de programmering,
zult u ervoor moeten zorgen dat de gyro de staart in de juiste richting
beweegt.
Om te controleren of de Gyro in de goede richting werkt, duwt u de
staart stick naar rechts en let op de manier waarop de staart servo
beweegt. Vervolgens neemt u de staart van de heli en beweeg hem naar
links. Als het roer twee keer op dezelfde manier beweegt, dan is uw
gyro richting correct ingesteld. Als het roer in tegengestelde richting
beweegt, dan moet je de GDIR (gyroscoop reverse) functie wijzigen.
Voor toegang tot de GDIR menu, drukt u op de + / - FUNC-knop van de controle versterker totdat je bij de GDIR menu aankomt en gebruik de + / - DATA-toets om de geselecteerde waarde aan te passen. Als het op REV (reverse) is ingesteld, verander het dan naar NOR (normaal) en als het ingesteld is op NOR, verander het dan naar REV.

Let op: De instructies die hierboven worden gegeven wordt aangenomen dat de richting van uw roer servo correct is ingesteld in uw zender - om er zeker van te zijn dient u dat u te ook controleren of de staart servo in de juiste richting op beweegt.
Stap 2:
Druk op de + / - van de FUNC knoppen op de controleversterker totdat je bij het menu Mode functie bent en stel de Mode in op CMT. Dit geeft u de beschikking om in uw zender te schakelen tussen NOR (rate) Mode en AVC (heading hold)-modus, dit allemaal zal u toelaten om het roer in de neutrale positie van de staart servo te zetten.

Om de neutrale positie in te stellen van het roer, beweegt u de roer stick van links naar rechts meerdere keren totdat de servo zichzelf centreert.
Stap 3:
Ga terug naar het opstartscherm van de gyro en schakel de gain schakelaar op uw zender tussen normaal en heading hold modus 3 keer tot **** toont op het scherm. Nu wordt de center positie opgeslagen in de gyro die u zojuist hebt ingesteld. Afhankelijk van hoe uw radio is ingesteld, moet u de normal / heading hold gain functies toewijzen van de schakelaar in uw zender.
U weet dat de gyro modes verandert omdat de "A" op het scherm zal veranderen in een "N" wanneer u de schakelaar omschakelt .
Stap 4:
Nu de Gyro actief is in de normale (NOR)-modus en we weten dat de servo wordt gecentreerd wanneer het roer stick in het midden is. Installeer de servo horn op de roer servo. Het is belangrijk dat je de servo horn op precies 90 graden instelt t.o.v. het roer nokkenas dan krijg je gelijke verstellingen in beide richtingen.

De servo hoorn meegeleverd met de meeste Futaba servo's hebben 4 gaten - zorg ervoor dat u degene kiest die u een perfecte hoek van 90 graden geeft.
Stap 5:
Pas uw staart link lengte (door het
strakker / of het losdraaien van de bal links) tot het rond het midden
draaien van de servo hoorn gelijk is.
Met behulp van de LMTA / LMTB menu-instellingen op de controle
versterker, zet de limiet op kant A en B gelijk zodat ze meer dan 100%
staan zonder dat ze brommen. U kunt schakelen tussen LMTA / LMTB met
behulp van de staartstick op uw zender

Vaststelling van de grenzen van minder dan 100% kan de levensduur van uw servo aanzienlijk verminderen.
Van wat ik heb gehoord, de Gyro werkt het
beste met een herstellingslimiet instelling tussen 110% en 120%, met
115% als de optimale instelling.
Indien de servo begint te brommen voor dat u de grens van 100% bereikt,
dan is uw servo hoorn te lang is of het gat die je gebruikt te ver weg
Aan de andere kant, als er geen
verstelling meer mogelijk is (instelling is meer dan 145%) dan heeft u
een servo hoorn die niet lang genoeg is of moet je een gat gebruiken
dat meer naar buiten ligt.
TIP: Dit is een bijzonder belangrijke stap, dus neem
de tijd om het goed te krijgen. Het niet goed afstellen van de limieten
kan niet alleen invloed op de levensduur van uw roer servo hebben, maar
de algehele prestaties van de GY611 gyro en je heli.
Stap 6:
Gebruik de + / - FUNC knoppen om terug te gaan naar het Mode menu-instelling en zet deze op AVC (heading hold)-modus.

Als je een schaalmodel vliegt en rate modus wil gebruiken, stel dan vervolgens de modus in op NOR (normaal).

Stap 7:
Druk op de + / - FUNC knoppen tot je bij
de FMOD menu komt. De FMOD functie geeft u de mogelijkheid te kiezen
tussen FC3 en 3D-vlieg stijlen.
FC3 Mode stopt de staart meer precies, terwijl 3D-modus een beetje
zachter toevoegt aan de mix en resulteert in een meer consistente
pirouette snelheid tijdens de snelle vlucht

Ik heb de mijne op 3D-modus gezet zoals de meeste RC heli piloten dit doen - probeer ze allebei uit en kijk wat je het beste bevalt
Stap 8:
Gebruik de + / - FUNC knop om naar de D1IA / D1IB menu te gaan. Deze functie is verantwoordelijk voor hoe snel / hard het roer reageert op uw controle-ingangen
Om te voorkomen dat u overmatige stress krijgt op uw servo / heli, wijzig deze instelling naar 10% met behulp van de + / - DATA knoppen. Om naar de D1IB instelling te gaan, beweeg je roer stick naar links of rechts totdat deze verschijnt op de controle-versterker
Stap 9:
Gebruik de + / - FUNC knop om naar de D1DA / D1DB menu te gaan. Deze functie is het tegenovergestelde van de bovenstaande functie en is verantwoordelijk voor hoe hard het staartroer vertraagt wanneer u de stick op uw zender in de midden positie brengt om de staart beweging te stoppen

Zoals in de bovenstaande stap, om te
voorkomen dat teveel stress op uw heli en onderdelen wordt uitgeoefent,
stel de D1DA tot 40% en D1DB tot 40%. Gebruik de staart knuppel om te
schakelen tussen de D1DA / D1DB instellingen.
Je zal niet veel verschil merken (eventuele) in de vlucht van de
prestaties door het veranderen van de D1DA / D1DB en D1IA / D1IB
(bovenstaande stap) instellingen, maar het zal helpen het behoud van de
integriteit van uw staart drive systeem en de levensduur van uw RC
helikopter.
Stap 10:
En tenslotte, moet je gyro versterking ingesteld worden. Dit kan in de zender in het ATV menu of gyro sens menu of direct op de gyro versterker.instellen met behulp van de G: 1A-menu. Ik zou adviseren te beginnen met een versterking ergens tussen 32% en 37% (Futaba radio's) of 66% en 69% (JR radio's).

U kunt deze waarde later verhogen als u wilt, maar het is belangrijk om niet te beginnen met een gain-instelling hoger dan 37%. Als uw gain te hoog is ingesteld, kan het uw RC helikopter staart zeer hevig stoppen wat schade aan uw heli kan veroorzaken.


|
Compatibility
Sanwa / Airtronics zenders. Als u de SL720 wilt gebruiken met een andere type zender, controleer dan met de service centrum in uw land, of e-mail CSM technische ondersteuning inzake graden te gebruiken. Wij raden niet aan
deze gyro te gebruiken samen met de JR 810G of de Volz Speed-Maxx. 250 frames / sec - dit kan worden gewijzigd met behulp van de PC-interface. Om de Futaba 9251, 9256 of BLS251 Servos: gelieve u de gyro instellingen 760ms en 333 frames / sec gebruiken met behulp van de PC-interface voor het aansluiten van de servo. De Logictech 6100T (zoals verkocht met het Logictech 6100G gyro) en de Hitec 5083MG servo's worden genoteerd als 960ms puls met een breedte van maar onze piloten hebben gevonden theycan worden gebruikt met de SL720 gyro vastgesteld op 760ms pulsewidth. bereik dan een van onze vorige gyroscopen. Voor de beste prestaties servo, raden we u aan de hoogste spanning die uw servo en RC systeem zal aanvaarden (let wel dat deze meer mag zijn dan de gyro) om een goede kwaliteit accu staat te controleren en zorgvuldig na te gaan voordat iedere vlucht. U zou kunnen overwegen het handhaven van de lading in uw ontvanger batterij tussen de luchten door het gebruik van een kwaliteit Delta Peak veld Type lader. De laatste SL720 en SL630 gyroscopen hebben het extra functie die als ze een statische elektrische ontlading, of een vermogen dip of spike, zie tijdens de
vlucht, zal op de SET-LED knipperen wanneer het model is aangeland. vinden dat ze zeer goede prestaties met de standaardinstellingen, maar, zult u niet in staat zijn om 760ms pulsewidth servo's te gebruiken zonder het gebruik van de PC-interface.
|

| Manual | DS760 |
Overzicht
Of u nu een ambitieuze beginner, een 3D Pro of gewoon de liefde heeft
voor gadgets dan is de Spartan ds760 gyro de ultieme keuze voor jou.
Zijn eenvoudige installatie, hoge trillingen immuniteit, en
ongeëvenaarde prestaties zijn gegarandeerd.
Hou je van hart bonzende 3D? Deze ds760 is ontworpen om dat gevoel te leveren! De ds760 is een hoge specificatie model helikopter gyro staat voor het leveren van uitzonderlijke prestaties zelfs op oogverblindende snelheden van meer dan twee volle omwentelingen per seconde. De controle is vloeiend en nauwkeurig met een zeer solide gevoel en indrukwekkende houdkracht. Het karakteristieke stoppen van de staart verloopt zacht, maar nauwkeurig zonder terug te slaan.
Configuratie
De ingebouwde configuratie routine maakt aanpassingen van de individuele eindpunten links en rechts mogelijk, richting omkeren en servo type selectie. Daarnaast kan de ds760 worden aangesloten op een personal computer of Pocket PC biedt toegang tot meer geavanceerde parameters waaronder versnellen, vertragen, stop versterking en nog veel meer. Optioneel is het afneembare display dit biedt snelle toegang tot alle configuratie parameters.
Compatibiliteit
Laat je gyro u niet beperken in uw keuzes. Of u nu vliegt met een 2.4GHz, PCM of PPM / FM-radio systeem, gebruik maakt van NiCDs of ontvanger LiPo batterijen, of gebruik wilt maken van een servo 760uSec, de ds760 zal blij zijn om te werken met elke willekeurige combinatie die u kiest. In feite kan het rechtstreeks werken vanuit een 2S LiPo-accu en is hij klaar voor de volgende generatie van 7.4V servos.
De ds760 ondersteunt alle moderne digitale servo's inclusief Futaba S9251 / S9253 / S9254 / S9256 / S9257 / S9650 / S3153 / S3154 / BLS251, JR 8900G / 3400G / 2700G / 8700G / 810G, Sanwa ERG-WRX, Airtronics 94758 / 94761, Hitec 5925MG / 6965HB, Robbe FS61BB, LogicTech 3100G / 6100G, Sky HDS-577 / HDS-877.
Bevat
Meet slechts 28.4 mm vierkant en 12 mm hoog (1,1 x 1,1 x 0,5 cm) en weegt slechts 16 gram, de ds760 is zonder twijfel de kleinste high-performance gyro op de markt. De eenheid en lichtgewicht ontwerp samen met adaptieve controle algoritmen bieden optimale prestaties voor uw helikopter, of je nu een miniatuur Hurricane 200 vliegt of grote maat 90 nitro machine.
Ondersteunen
Spartan RC zet zich in voor after sales ondersteuning en gelooft in continue verbetering van zijn producten. Als zodanig is de ds760 ontworpen en kan de firmware van deze unit simpelweg van achter uw pc vandaan geupgrade worden. Als er een update beschikbaar is, sluit u simpelweg de ds760 op uw PC via de USB-of Bluetooth-interface, downloaden en uitvoeren van de firmware-update hulpprogramma en u zal genieten van de nieuwe functies en betere prestaties in een kwestie van minuten.
